Robots que parecen humanos
Un breve repaso a la robótica humanoide
Este artículo repasa brevemente la tecnología robótica humanoide. En primer lugar, se presenta el desarrollo histórico y el progreso en términos de hardware de los robots humanoides bípedos de cuerpo completo, junto con los avances en generación de patrones para la locomoción bípeda. Después se presenta el «movimiento de cuerpo entero» –la coordinación de movimientos de piernas y brazos para aprovechar el alto grado de libertad de los humanoides–, seguido de su aplicación en disciplinas como la evaluación de dispositivos y el montaje a gran escala. También se trata el tema de los humanoides de medio cuerpo con una base móvil, utilizados principalmente en la investigación de las interacciones humano-robot y en la robótica cognitiva, antes de centrarse en los problemas actuales y sus perspectivas de futuro.
Palabras clave: robots humanoides, robótica, humanoides bípedos, interacción humano-robot.
Introducción
El término robot humanoide (o simplemente humanoide) suele referirse a aquellos robots cuya forma es similar a la de los humanos. Sin embargo, la definición varía según a quién preguntemos: hay quien dice que un humanoide debería tener un «cuerpo completo» que incluya dos brazos y dos piernas, exactamente como un humano, pero otros se centran más en la comunicación o en su capacidad para realizar tareas y extienden la definición a un robot móvil con ruedas que tiene «la mitad superior del cuerpo», con una cabeza, torso y dos brazos. Este artículo pretende cubrir la investigación en robótica humanoide en un sentido amplio para mostrar las tendencias globales de investigación en esta disciplina.
Los humanoides bípedos y su historia
La definición más restrictiva de robot humanoide indica que se trata de un robot bípedo actuado1 con un torso, brazos y una cabeza, diseñado para lograr algunas capacidades humanas. Comencemos comentando este tipo de humanoide.
«El término robot humanoide suele referirse a aquellos robots cuya forma es similar a la de los humanos»
Existe un consenso en cuanto a que Japón lideró la investigación en robots humanoides hasta aproximadamente comienzos del siglo xxi, mientras que ahora se estudian en casi todo el mundo. El primer humanoide en el entorno académico fue el WABOT-1 de Kato (WAseda roBOT-1), que puede caminar, reconocer un objeto y manipularlo con las manos (Kato, Ohteru, Kobayashi, Shirai y Uchiyama, 1973) (Figura 1a). Su forma de caminar es «cuasiestática», con pasos estables que siempre mantienen el centro total de la masa dentro del polígono de apoyo formado por el contorno del pie (o pies) apoyado en el suelo. Aunque únicamente se podía mover lentamente, sigue resultando sorprendente que pudieran desarrollar un robot humanoide completo hace más de cuarenta años. En aquellos primeros años, debido principalmente a las limitaciones tecnológicas, no muchos creían en los robots humanoides, que seguían considerándose ciencia ficción.
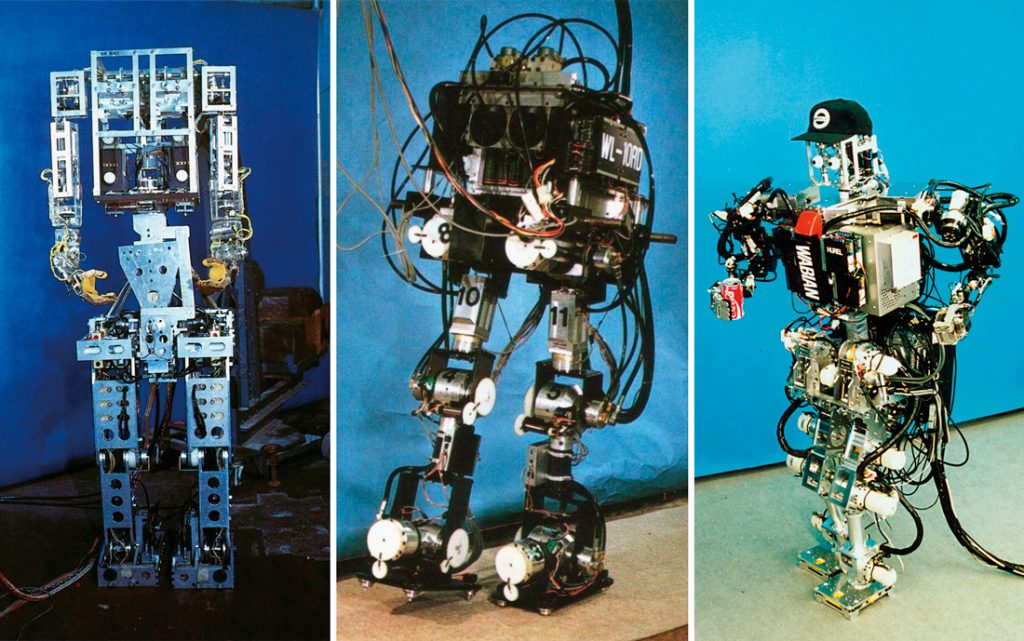
Figura 1. Robots humanoides desarrollados por la Universidad de Waseda (Japón), donde se creó el primer humanoide en un entorno académico. Hasta comienzos del siglo xxi, Japón lideró la investigación en robots humanoides. De izquierda a derecha: a) WABOT (WAseda roBOT); b) Waseda Leg (WL-10RD) y c) WABIAN (WAseda BIpedal HumANoid). / De izquierda a derecha: Humanoid Robotics Institute, Universidad de Waseda (Tokio, Japón); Atsuo Takanishi Laboratory, Universidad de Waseda (Tokio, Japón); Atsuo Takanishi Laboratory, Universidad de Waseda (Tokio, Japón).
Algunos investigadores continuaron trabajando en el caminar dinámico de los robots bípedos junto al desarrollo del hardware. Los profesores Takanishi y Yamaguchi, de la Universidad de Waseda en Japón, desarrollaron la WL (Waseda Leg, “pierna de Waseda”) y la serie de humanoides WABIAN (WAseda BIpedal humANoid, “humanoide bípedo de Waseda”) (figuras 1b y 1c), con estabilidad dinámica al caminar. Los movimientos de la mitad superior del cuerpo se controlan mediante el concepto de punto de momento cero (Vukobratovic y Borovac, 2004), que se puede entender como la versión dinámica del centro de masa. Esto es especialmente útil durante los movimientos dinámicos rápidos, puesto que el robot no caerá siempre que el punto de momento cero permanezca dentro del polígono de apoyo, aunque el centro de masa se salga de este (Figura 2).
Mientras tanto, en 1986, Honda R&D lanzó un proyecto secreto de robots humanoides y en 1996 dio a conocer el robot humanoide P2 (Prototype 2), resultado de diez años de investigación. P2 es un humanoide autónomo de 1,82 m de alto y 210 kg capaz de caminar por control remoto inalámbrico, subir y bajar escaleras y empujar un carro. Su repentina aparición causó sorpresa y conmoción entre muchos investigadores, pero tuvo un efecto positivo, puesto que impulsó la investigación en humanoides para aplicaciones realistas y mostró que los humanoides ya no eran ciencia ficción.
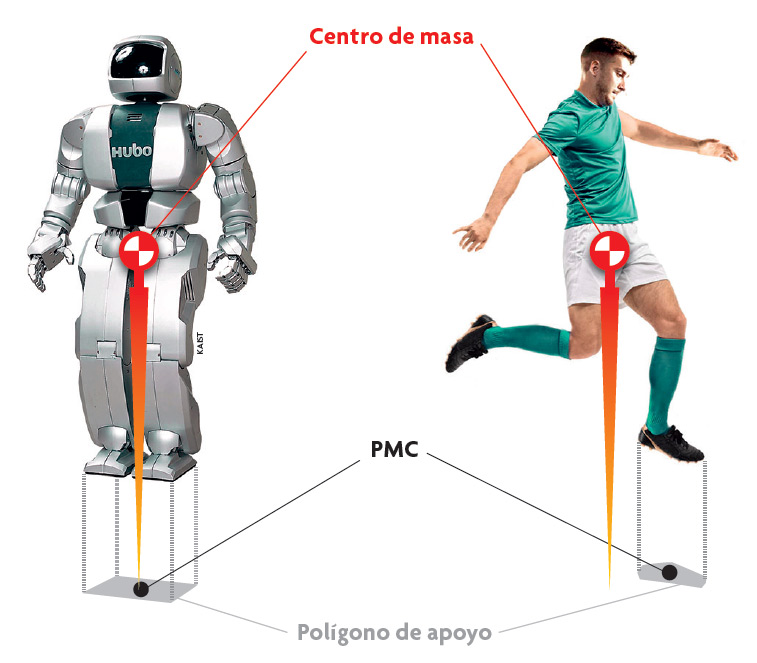
Figura 2. En un movimiento cuasi estático, el robot mantiene el equilibrio mientras el centro total de su masa permanece dentro del polígono de apoyo formado por el contorno del pie (o pies) apoyado en el suelo. A medida que va desarrollándose el caminar dinámico de los robots bípedos, nace el concepto punto de momento cero (PMC), un punto de apoyo que puede sostener un movimiento más dinámico por parte del cuerpo (como el de la figura humana en la imagen) sin que este caiga, aunque el centro total de la masa se salga del polígono inicial de apoyo. / Mètode
Poco después, en Japón comenzó un proyecto nacional llamado HRP (Humanoid Research Project) con la ayuda de Honda y otras empresas para desarrollar robots humanoides que pudieran coexistir en la sociedad humana y colaborar con los humanos. Honda continuó mejorando sus robots humanoides: creó su Prototype 3 y, finalmente, ASIMO (Advanced Step in Innovative MObility, “paso avanzado en movilidad innovadora”) que puede saltar y correr, servir té, y cargar su propia batería (Figura 3). El proyecto HRP acabó en 2003 con el HRP-2 (Figura 4a) como resultado de su desarrollo de hardware. Durante este tiempo, se estableció la generación de patrones de paso bípedos. El equipo de Shuuji Kajita aplicó el control de previsualización o control predictivo por modelo para computar los pasos a partir de la trayectoria del punto de momento cero deseado, derivada de los pasos deseados y basada en un modelo lineal simplificado de péndulo invertido (Kajita, Hirukawa, Harada y Yokoi, 2014; Kajita et al., 2003). Como resultado, el control de previsualización permite calcular la velocidad del centro de masa en tiempo real teniendo en cuenta la progresión futura del punto de momento cero mediante el modelo de control predictivo, lo que se traduce en movimientos suaves al caminar. Este método se basa en una técnica de optimización (Wieber, 2008) que limita el punto de momento cero a un área determinada dentro polígono de apoyo. Aunque el modelo lineal de péndulo invertido es bastante simple, se ha demostrado que se puede generar un patrón práctico de paso dinámico mediante un sistema de control predictivo, uno de los métodos estándar para generar locomoción bípeda.
Los siguientes proyectos de HRP produjeron plataformas de hardware como HRP-3 –con una estructura fuerte para uso industrial– y Cybernetic Human HRP-4C –con una forma más parecida a la humana para usos relacionados con el entretenimiento, como se puede ver en las figuras 4b y 4c.
«Hay quien dice que un humanoide debería tener un «cuerpo completo», exactamente como un humano, pero otros se centran más en sus habilidades»
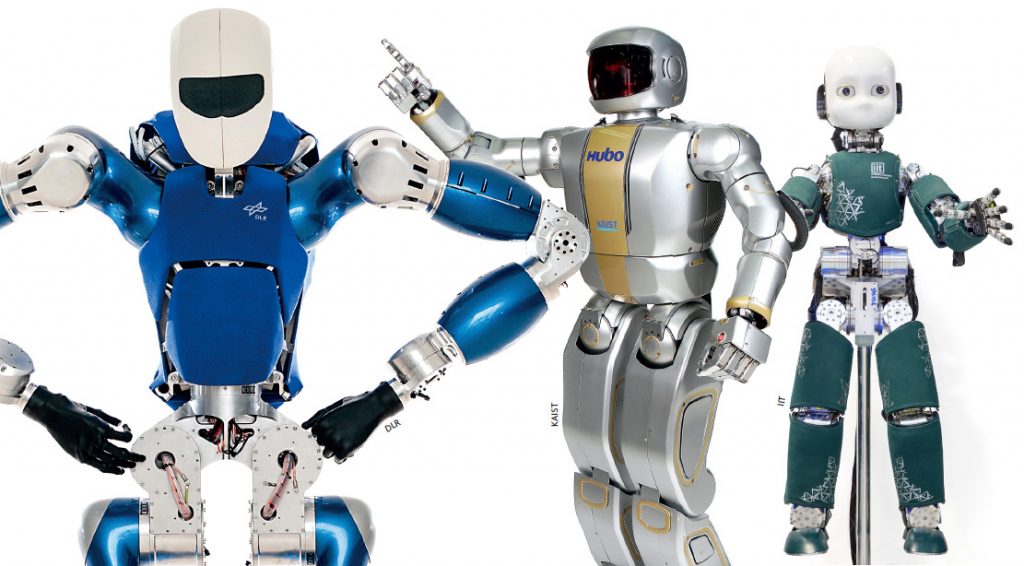
Tanto de HRP como de otros proyectos posteriores se aprendió una lección: la importancia de las plataformas compartidas. Muchas universidades e instituciones han utilizado las plataformas HRP-2 y iCub, lo que facilita compartir la carga del desarrollo y los resultados. Además del software habitual, las plataformas de desarrollo –a menudo de código abierto, como ROS y Gazebo, YARP y Choreonoid– también tienen un papel importante para los investigadores, pues les ayudan a compartir e intercambiar su software más reciente. Por ejemplo, la instalación de HRP-2 en el Laboratorio para el Análisis y la Arquitectura de Sistemas del Centro Nacional Francés de Investigaciones Científica (CNRS, por sus siglas en francés) fue el detonante de muchos proyectos colaborativos de investigación sobre robots humanoides en muchas instituciones europeas. Se realizaron muchas publicaciones conjuntas a través de proyectos de la UE (Yoshida et al., 2009). Desde mediados de los años 2000 se han desarrollado diversos robots humanoides de cuerpo entero, incluyendo WABIAN-2, TORO (Figura 5a), Hubo (Figura 5b), iCub (Figura 5c) y Talos, algunos de los cuales también se han utilizado como plataformas de investigación para proyectos conjuntos.
Mientras tanto, también se han desarrollado robots humanoides pequeños de cuerpo completo. Algunos ejemplos representativos de estos robots son HOAP-3 (Fujitsu), QRIO (Sony) y NAO (Softbank Robotics), algunos de los cuales se han comercializado y se suelen utilizar como plataforma. Las ventajas de estos robots son su precio asequible y la facilidad para hacer experimentos con ellos sin preocuparse por que sufran graves daños al caer. Su capacidad para la expresión corporal completa y la interacción basada en sensores también se puede utilizar para investigar las interacciones humano-robot y la robótica cognitiva, descrita más adelante en este artículo.

Figura 3. El humanoide ASIMO fue desarrollado por Honda R&D dentro de la iniciativa Humanoid Research Project, que se llevó a cabo en todo Japón hacia finales de los años noventa e inicios del siglo xxi, con el objetivo de crear robots humanoides que pudieran coexistir y colaborar con humanos. / wikipedia
Aplicaciones y movimiento de cuerpo entero
En 2005, justo después del HRP, las características esperadas de los robots humanoides eran las siguientes: 1) la forma debe ser útil, 2) los humanoides tienen que poder utilizar las herramientas humanas habituales: por ejemplo, operar maquinaria pesada en obras peligrosas y 3) los humanoides deben poder trabajar en los entornos sociales humanos habituales (Goswami y Vadakkepat, 2019; Kajita et al., 2014). Han pasado más de diez años y, para nuestra sorpresa, la mayoría de estas predicciones se están convirtiendo en realidad, como se comenta más adelante. La tecnología básica que se espera para permitir estas aplicaciones es la planificación y control del movimiento de «cuerpo entero», que genere no solo la locomoción bípeda sino también los movimientos coordinados de todas las extremidades, posiblemente reproduciendo los movimientos humanos o mediante el contacto de múltiples puntos con objetos o con el entorno.
Una aplicación típica de la característica 1 es el uso para el entretenimiento o el archivo digital del patrimonio cultural inmaterial. El Cybernetic Human HRP-4C (Kaneko et al., 2009) se ha utilizado como bailarín o como maestro de ceremonias. Otro ejemplo es el uso para el archivo digital de la cultura tradicional, en peligro por la falta de sucesores. Shin’ichiro Nakaoka y su equipo demostraron que el robot humanoide HRP-2 puede reproducir los movimientos dinámicos humanos de la danza tradicional japonesa, lo que muestra la posibilidad de usar humanoides como instructores de cultura tradicional, archivando y reproduciendo movimientos como estos (Nakaoka et al., 2005). Por otra parte, Calinon y Billard propusieron un método para imitar el movimiento humano basándose en un marco estadístico llamado «proceso de Gauss» para generar movimiento humano (Calinon, D’halluin, Sauser, Caldwell y Billard, 2010).
Otra aplicación emergente que aprovecha la forma del humanoide es utilizarlos para evaluar dispositivos portátiles en lugar de hacerlo con humanos (Miura et al., 2013). Se puede hacer que un robot humanoide con forma y estructura similar a la humana reproduzca movimientos registrados por los usuarios basándose en una avanzada técnica de redirección que transforme los movimientos originales en movimientos de los humanoides (Ayusawa y Yoshida, 2017). Se espera que esta aplicación aporte varias ventajas para solucionar algunos problemas de los experimentos con humanos: la evaluación cuantitativa del efecto de apoyo (en lugar de cuestionarios subjetivos) –lo cual facilitaría procedimientos que tienen una fuerte carga ética– y una alta repetibilidad de situaciones cercanas al uso real. La Figura 6 muestra un ejemplo de una de estas aplicaciones en las que el robot humanoide HRP-4 lleva puesto un dispositivo de apoyo llamado muscle suit (“traje muscular”) (Kobayashi, Aida y Hashimoto, 2009) y evalúa su potencia de soporte (Ito, Ayusawa, Yoshida y Kobayashi, 2017).
«Japón lideró la investigación en robots humanoides hasta principios del siglo XXI; Ahora se estudian en casi todo el mundo»
Antes de examinar las otras características (2 y 3), me gustaría mencionar un incidente importante que cambió el panorama de la investigación con humanoides casi por completo. Cuando el gran terremoto golpeó la región japonesa de Tohoku y provocó graves accidentes en la central nuclear de Fukushima Daiichi, los robots humanoides presentados anteriormente no pudieron utilizarse para buscar víctimas enterradas entre los escombros ni para sustituir a los humanos en operaciones críticas en entornos radiactivos. Pese a la desilusión, esta tragedia llevó a los investigadores en robótica humanoide a centrarse en las actividades humanitarias, especialmente en la respuesta a catástrofes.
La competición DARPA Robotics Challenge (DRC) se lanzó con esta idea. Los robots participantes tenían un tiempo limitado para completar tareas como conducir vehículos, abrir puertas, rotar válvulas, utilizar herramientas, atravesar terreno difícil, subir escaleras, etc. Las mencionadas características 2 y 3 son muy relevantes para las tareas requeridas por el DRC. Como resultado, se ha progresado notablemente en poco tiempo. Esto se puede atribuir al efecto de competición, que moviliza a muchas personas, además de la distribución de las plataformas comunes mencionadas anteriormente; en este caso, el robot humanoide de actuación hidráulica Atlas. Incluso con el revuelo suscitado por la inutilidad de los humanoides en catástrofes reales, el DRC llamó la atención del público y revitalizó la investigación activa e intensiva sobre humanoides. La diferencia es que la investigación con humanoides se lleva ahora a cabo en todo el mundo, mientras que a finales de los noventa y principios de los 2000 se limitaba a unas pocas instituciones.

Figura 4. Robots humanoides desarrollados en el Instituto Nacional de Ciencia y Tecnología Industrial Avanzada (AIST, por sus siglas en inglés) de Japón. De izquierda a derecha: a) HRP-2, b) HRP-3·y c) Cybernetic Human HRP-4C. Se trata de robots destinados a usos relacionados con la industria y el entretenimiento y que tienen una forma más parecida a la humana. / AIST
Aunque su utilidad última sería la respuesta a catástrofes, el uso de «humanoides industriales» en la fabricación a gran escala se está investigando de forma cada vez más intensa desde hace unos años, en busca de aplicaciones más cercanas a las características 2 y 3. Un caso ejemplar es la fabricación de aviones, un proceso mucho menos automatizado que la industria automovilística, puesto que muchos de los procesos de ensamblaje se siguen realizando manualmente. Los trabajadores humanos suelen realizar tareas repetitivas y aburridas en entornos reducidos, a veces forzados a adoptar posturas difíciles, lo que puede conllevar graves problemas físicos. Se espera que los robots humanoides ejecuten estos trabajos para liberar a los trabajadores humanos de tareas «sin valor añadido» y que puedan concentrarse en otras más creativas e inteligentes. A diferencia de la respuesta a catástrofes, la ventaja de esta aplicación es que normalmente tenemos información sobre el entorno –por ejemplo, los datos de diseño asistido por computadora del montaje de un avión– que puede ayudar al humanoide a ubicarse en base a la información sensorial (por ejemplo, la visión) que recibe. Recientemente, Airbus Group colaboró con el CNRS y el Instituto Nacional de Ciencia y Tecnología Industrial Avanzada de Japón (AIST, por sus siglas en inglés) para desarrollar tecnologías que permitieran a los robots humanoides apretar tuercas y comprobar interruptores (Bolotnikova et al., 2017; Pfeiffer, Escande y Kheddar, 2017).
La tecnología básica que permite estas tareas complejas es la planificación de movimiento multicontacto, estudiada de manera intensiva para ampliar el rango de actividades (Borràs, Mandery y Asfour, 2017). Esta técnica permite a un robot humanoide moverse apoyando su cuerpo en múltiples puntos del entorno utilizando no solo los pies sino también los brazos y otras partes del cuerpo para superar dificultades en el terreno, subir una escalera de mano o reptar en espacios estrechos. Una vez se planifica esta secuencia de contactos, un controlador de cuerpo entero se ocupa de generar y controlar la trayectoria para seguir la ruta planeada.
«La tragedia de Fukushima llevó a los investigadores en robótica humanoide a centrarse en las actividades humanitarias»
Estas aplicaciones no se limitan a la fabricación de aviones, sino que pueden aplicarse a astilleros, a la construcción y al mantenimiento industrial. Ahora que las empresas proponen varias alternativas en la búsqueda de plataformas de humanoides industriales de tamaño humano, podemos esperar humanoides que se utilicen para aplicaciones prácticas en el futuro cercano, conforme progresen sus capacidades.
Humanoides móviles de medio cuerpo
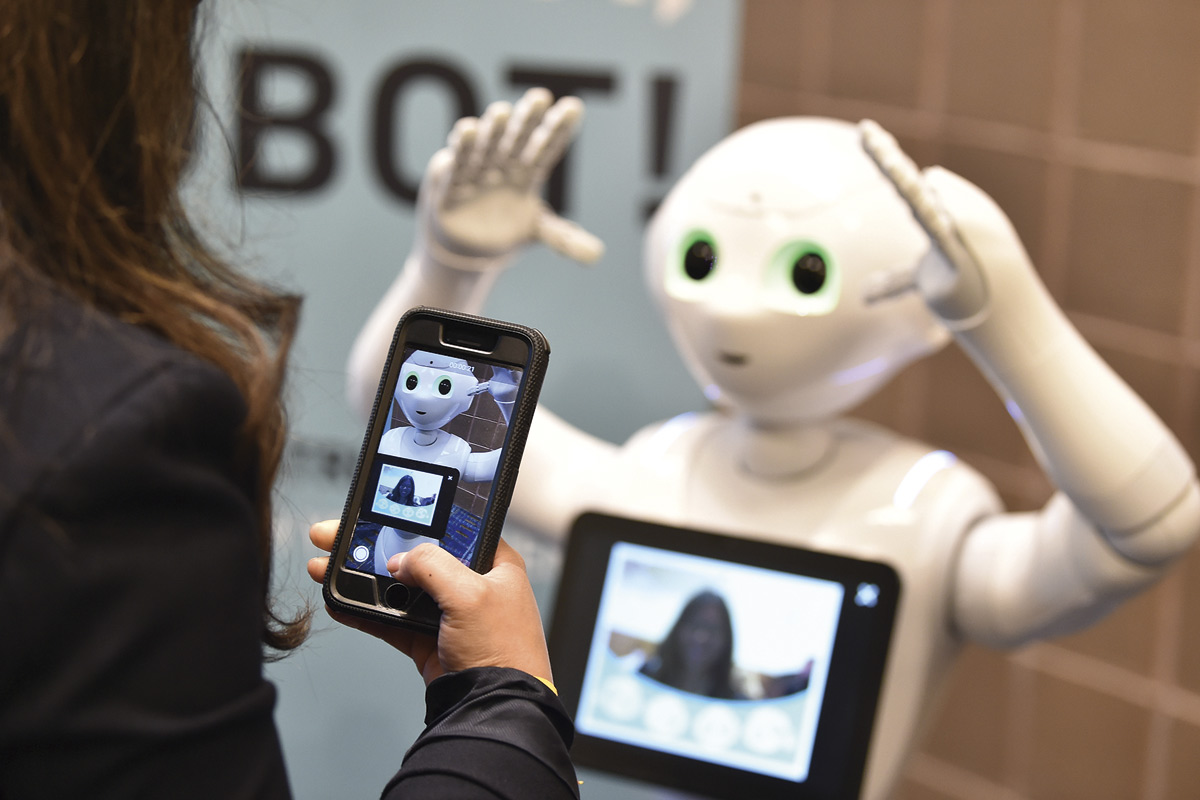
Hasta el momento nos hemos concentrado en los bípedos de cuerpo entero y sus aplicaciones para la ejecución de tareas, pero los robots humanoides también se han utilizado mucho para investigar sobre la interacción humano-robot y la robótica cognitiva. Para ello se han desarrollado diversos humanoides con la parte superior del cuerpo humano, normalmente equipados con una base móvil con ruedas –en el artículo nos referiremos a ellos como humanoides móviles de medio cuerpo– como Robovie, ARMAR-III, PR-2, y Pepper.
Los humanoides móviles de medio cuerpo son útiles en la investigación de las interacciones humano-robot por su capacidad para adoptar una gran variedad de comportamientos combinando las trayectorias de la base móvil y los movimientos de la parte superior del cuerpo. Takayuki Kanda y su equipo llevaron a cabo una serie de estudios en los que un robot humanoide interactuaba y proporcionaba servicios a los seres humanos. El humanoide Robovie se introdujo como tutor para enseñar una lengua extranjera a niños (Kanda, Hirano, Eaton e Ishiguro, 2004), como guía en un museo que puede reforzar la experiencia de los visitantes (Shiomi, Kanda, Ishiguro y Hagita, 2006), y como guía afectivo en un centro comercial. Estos robots mostraron la posibilidad de utilizar humanoides que interactúen con los humanos de forma proactiva, pero que también utilicen su capacidad cognitiva para adelantarse a las intenciones de los usuarios con sensores a bordo o ambientales y con identificadores de radiofrecuencia. Estos experimentos han arrojado resultados positivos y prometedores para el desarrollo de robots humanoides que ofrezcan diversos servicios incluso en espacios llenos de gente.
Tamim Asfour y su equipo llevaron a cabo una investigación en robótica cognitiva y autónoma basándose en la plataforma ARMAR-III, especialmente en la interacción humano-robot y en tareas de manipulación autónoma de objetos en entornos cotidianos. ARMAR-III tiene una cabeza, dos brazos redundantes con siete grados de libertad –cada uno de ellos con una mano con ocho grados de libertad– conectados a una base omnidireccional mediante una articulación en la cadera. Aprovechando estos altos niveles de libertad, demostraron su capacidad para organizar platos y vasos en un lavavajillas y recoger un objeto mediante técnicas avanzadas de movimiento y planificación del agarre (Asfour et al., 2008). Su cabeza tiene sensores auditivos y visuales (Asfour, Welke, Azad, Ude y Dillman, 2008) para entender los comandos de voz del usuario y reconocer y localizar objetos basándose en las características visuales y en el reconocimiento de objetos por modelos en 3D.
«Los robots humanoides también se han utilizado para investigar sobre la interacción humano-robot y la robótica cognitiva»
La plataforma móvil de dos brazos PR-2 creada por Willow Garage también se ha utilizado para la investigación general en robótica, desde la planificación de tareas de alto nivel hasta la planificación de movimiento (Chitta, Cohen y Likhachev, 2010) y la sujeción de objetos (Van den Berg, Miller, Goldberg y Abbeel, 2010). El reciente humanoide móvil de medio cuerpo Pepper (Figura 7) comenzó a utilizarse también para las interacciones educativas humano-robot (Tanaka et al., 2015) y para otros trabajos como recepcionista o guía de diferentes instalaciones comerciales o públicas.
Por último, aunque no se le caracteriza como robot móvil, me gustaría mencionar el robot industrial de dos brazos Nextage de Kawada Robotics Corp. Es un robot con dos brazos que se puede implementar fácilmente y puede operar junto a los humanos en fábricas para ejecutar tareas de recogida y colocación en sistemas de producción por células de poco volumen y alta diversidad. Su característica más sobresaliente es la convivencia en entornos humanos gracias a su baja potencia y gran capacidad para realizar tareas. Es una de las aplicaciones más representativas de los robots humanoides en la industria y se espera que el conocimiento sobre su utilización se extienda a otros dominios como el ensamblaje a gran escala y el mantenimiento de fábricas, como se ha mencionado anteriormente.
Resumen y orientaciones para el futuro
Este artículo ofrece un breve resumen de los robots humanoides, incluyendo los aspectos históricos, el desarrollo de hardware y software y sus aplicaciones. Como se ha indicado anteriormente, la robótica humanoide es una disciplina activa que continúa creciendo y avanzando. A pesar del tremendo progreso hasta la fecha, todavía tiene margen de mejora. De por sí, la robótica requiere la integración de diferentes tecnologías de percepción, inteligencia y generación de movimientos, y me gustaría hacer hincapié en que, debido a su complejidad, los humanoides son los robots más exigentes de todos.

Figura 6. Los humanoides pueden ser utilizados para evaluar dispositivos portátiles, lo que evita ciertos problemas de los experimentos realizados con humanos, como la evaluación cuantitativa del efecto de apoyo en lugar de cuestionarios subjetivos. En las imágenes, evaluación por el humanoide HRP-4 del muscle suit, un dispositivo neumático asistencial que permite a un trabajador humano levantar y transportar pesos mayores de lo que podría por sí mismo. / Ito et al., 2017
Para que los robots humanoides realicen tareas útiles, es necesario incorporar la mayoría de tecnologías perceptivas: reconocimiento de entornos mediante señales visuales, auditivas y de profundidad, así como información táctil y de presión. Esta última es la que requiere más mejoras en la actualidad para mejorar el desarrollo futuro de los humanoides. La interacción física con los entornos es la habilidad más deficiente de los robots humanoides actuales. Aunque se están realizando intensos esfuerzos, los robots humanoides siguen siendo rígidos e insensibles, y están todavía lejos de las interacciones físicas flexibles y suaves que pueden realizar los humanos. Esto también está relacionado estrechamente con la tecnología de actuación. En los humanoides se suelen utilizar nuevos actuadores más flexibles, con eficiencia equivalente a la de nuestros músculos y que pueden reemplazar la combinación de motores eléctricos y engranajes mecánicos. Los robots humanoides «rígidos» disponibles actualmente son vulnerables a daños, especialmente cuando caen, y además pueden causar problemas graves si golpean a humanos. Por lo tanto, la robustez del hardware y su control son esenciales. La robótica blanda lleva décadas despertando interés y también podemos esperar avances gracias a la investigación interdisciplinar en biología y ciencia de los materiales. Por supuesto, también se deberían explorar técnicas de control para explotar el progreso en percepción y actuación. Todas estas tecnologías en desarrollo son esenciales para conseguir robots humanoides industriales de alto rendimiento como los mencionados anteriormente, que puedan realizar tareas delicadas de forma autónoma, colaborando con trabajadores humanos cuando sea necesario.
«Los significativos avances en inteligencia artificial pueden ser muy útiles para el trabajo con humanoides»
Por último, pero no menos importante, la inteligencia es indispensable al tratar con el físico complejo de los humanoides, así como con su entorno. En este artículo nos hemos centrado en la investigación en humanoides, pero los significativos avances en inteligencia artificial, especialmente en aprendizaje automático, también pueden ser muy útiles para el trabajo con humanoides. La inteligencia avanzada es necesaria en cualquier situación: para comprender y razonar acerca de su entorno, para tomar decisiones y cumplir las tareas necesarias y para interactuar con seres humanos y con el entorno de forma adaptativa, extendiendo la interacción humano-robot y la tecnología cognitiva. Las sinergias de la investigación multidisciplinar son más necesarias que nunca para llevar la tecnología humanoide a aplicaciones en el mundo real, para que estos se conviertan en los mejores compañeros del ser humano en el futuro.
1Un robot actuado es aquel que se mueve mediante actuadores; es decir, dispositivos que transforman una señal (generalmente eléctrica en estos casos) en un movimiento por parte del robot. (Tornar al text)
REFERENCIAS
Asfour, T., Azad, P., Vahrenkamp, N., Regenstein, K., Bierbaum, A., Welke, K., & Dillmann, R. (2008). Toward humanoid manipulation in human-centred environments. Robotics and Autonomous Systems, 56(1), 54–65. doi: 10.1016/j.robot.2007.09.013
Asfour, T., Welke, K., Azad, P., Ude, A., & Dillmann, R. (2008). The Karlsruhe humanoid head. En 2008 8th IEEE-RAS International Conference on Humanoid Robots, (pp. 447–453), Daejeon, Corea del Sur: IEEE. doi: 10.1109/ICHR.2008.4755993
Ayusawa, K., & Yoshida, E. (2017). Motion retargeting for humanoid robots based on simultaneous morphing parameter identification and motion optimization. IEEE Transactions on Robotics, 33(6), 1343–1357. doi: 10.1109/TRO.2017.2752711
Bolotnikova, A., Chappellet, K., Paolillo, A., Escande, A., Anbarjafari, G., Suarez-Roos, A., ... Kheddar, A. (2017). A circuit-breaker use-case operated by a humanoid in aircraft manufacturing. En 2017 13th IEEE Conference on Automation Science and Engineering (pp. 15–22), Xi’an, China: IEEE. doi: 10.1109/COASE.2017.8256069
Borràs, J., Mandery, C., & Asfour, T. (2017). A whole-body support pose taxonomy for multi-contact humanoid robot motions. Science Robotics, 2(13), eaaq0560. doi: 10.1126/scirobotics.aaq0560
Calinon, S., D’halluin, F., Sauser, E. L., Caldwell, D. G., & Billard, A. (2010). Learning and reproduction of gestures by imitation. IEEE Robotics & Automation Magazine, 17(2), 44–54. doi: 10.1109/MRA.2010.936947
Chitta, S., Cohen, B., & Likhachev, M. (2010). Planning for autonomous door opening with a mobile manipulator. En 2010 IEEE International Conference on Robotics and Automation (pp. 1799–1806), Anchorage, EE UU: IEEE. doi: 10.1109/ROBOT.2010.5509475
Goswami, A., & Vadakkepat, P. (Eds.). (2019). Humanoid robotics: A reference. Dordrecht: Springer.
Ito, T., Ayusawa, K., Yoshida, E., & Kobayashi, H. (2017). Human motion reproduction by torque-based humanoid tracking control for active assistive device evaluation. En 2017 IEEE-RAS 17th International Conference on Humanoid Robotics (pp. 503–508), Birmingham, Reino Unido: IEEE. doi: 10.1109/HUMANOIDS.2017.8246919
Kajita, S., Hirukawa, H., Harada, K., & Yokoi, K. (2014). Introduction to humanoid robotics. Berlín: Springer. doi: 10.1007/978-3-642-54536-8
Kajita, S., Kanehiro, F., Kaneko, K., Fujiwara, K., Harada, K., Yokoi, K., & Hirukawa, H. (2003). Biped walking pattern generation by using preview control of zero-moment point. En 2003 IEEE International Conference on Robotics and Automation (pp. 1620–1626), Taipei, Taiwan: IEEE. doi: 10.1109/ROBOT.2003.1241826
Kanda, T., Hirano, T., Eaton, D., & Ishiguro, H. (2004). Interactive robots as social partners and peer tutors for children: A field trial. Human-Computer Interaction, 19(1), 61–64. doi: 10.1207/s15327051hci1901&2_4
Kaneko, K., Kanehiro, F., Morisawa, M., Miura, K., Nakaoka, S., & Yokoi, K. (2009). Cybernetic Human HRP-4C. En 2009 9th IEEE-RAS International Conference on Humanoid Robots (pp. 7–14), París, Francia: IEEE. doi: 10.1109/ICHR.2009.5379537
Kato, I., Ohteru, S., Kobayashi, H., Shirai, K., & Uchiyama, A. (1973). Information-power machine with senses and limbs. En P. Serafini, E. Guazzelli, B. Schrefler, F. Pfeiffer, & F. Rammerstorfer (Eds.), On theory and practice of robots and manipulators. Vol. I (pp. 11–24). Viena: Springer. doi: 10.1007/978-3-7091-2993-7
Kobayashi, H., Aida, T., & Hashimoto, T. (2009). Muscle suit development and factory application. International Journal of Automation Technology, 3(6), 709–715. doi: 10.20965/ijat.2009.p0709
Miura, K., Yoshida, E., Kobayashi, Y., Endo, Y., Kanehiro, F., Homma, K., … Tanaka, T. (2013). Humanoid robot as an evaluator of assistive devices. En 2013 IEEE International Conference on Robotics and Automation (pp. 679–685), Karlsruhe, Alemania: IEEE. doi: 10.1109/ICRA.2013.6630646
Nakaoka, S., Nakazawa, A., Kanehiro, F., Kaneko, K., Morisawa, M., & Ikeuchi, K. (2005). Task model of lower body motion for a biped humanoid robot to imitate human dances. En 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 3157–3162), Edmonton, Canadá: IEEE. doi: 10.1109/IROS.2005.1545395
Pfeiffer, K., Escande, A., & Kheddar, A. (2017). Nut fastening with a humanoid robot. En 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 6142–6148), Vancouver, Canadá: IEEE. doi: 10.1109/IROS.2017.8206515
Shiomi, M., Kanda, T., Ishiguro, H., & Hagita, N. (2006). Interactive humanoid robots for a science museum. En Proceedings of the 1st ACM SIGCHI/SIGART Conference on Human-Robot Interaction, (pp. 305–312). Nueva York: Association for Computing Machinery. doi: 10.1145/1121241.1121293
Tanaka, F., Isshiki, K., Takahashi, F., Uekusa, M., Sei, R., & Hayashi, K. (2015). Pepper learns together with children: Development of an educational application. En 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids) (pp. 270–275), Seúl, Corea del Sur: IEEE. doi: 10.1109/HUMANOIDS.2015.7363546
Van den Berg, J., Miller, S., Goldberg, K., & Abbeel, P. (2010). Gravity-based robotic cloth folding. En D. Hsu, V. Islker, J.-C. Latombe, & M. C. Lin (Eds.), Algorithmic Foundations of Robotics IX (pp. 409–424). Berlín-Heidelberg: Springer. doi: 10.1007/978-3-642-17452-0_24
Vukobratovic, M., & Borovac, B. (2004). Zero-moment point. Thirty-five years of its life. International Journal of Humanoid Robotics, 1(1), 157–173. doi: 10.1142/S0219843604000083
Wieber, P. B. (2008). Viability and predictive control for safe locomotion. En 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 1103–1108), Niza, Francia: IEEE. doi: 10.1109/IROS.2008.4651022
Yoshida, E., Laumond, J.-P., Esteves, C., Kanoun, O., Mallet, A., Sakaguchi, T., & Yokoi, K. (2009). Motion autonomy for humanoids: Experiments on HRP-2 No. 14. Computer Animation and Virtual Worlds, 20 (5–6), 511–522. doi: 10.1002/cav.280